ระบบสแกนสามมิติในปัจจุบัน แบ่งได้ 2 แบบคือ
- การสแกนด้วยคน โดยผู้ใช้งานเป็นผู้ถือ 3D scanner และขยับสแกนเนอร์ไปยังตำแหน่งต่าง ๆ ของวัตถุที่ต้องการสแกนให้ครบทุกตำแหน่ง
- การสแกนด้วยหุ่นยนต์ โดยผู้ใช้งานต้องวางแผนตำแหน่งการเคลื่อนที่ของแขนหุ่นยนต์เพื่อให้สามารถสแกนวัตถุที่ต้องการได้ครบทุกตำแหน่ง
ทั้ง 2 วิธีที่กล่าวมานี้ ผู้ใช้งานจำเป็นที่จะต้องมีความรู้ในการใช้ 3D scanner หรือการควบคุมและวางแผนการเคลื่อนที่ของหุ่นยนต์
จากโจทย์ข้างต้นนี้ นักวิจัยจึงได้พัฒนาระบบหุ่นยนต์สแกนสามมิติโดยอัตโนมัติ ซึ่งเป็นซอฟต์แวร์บังคับการเคลื่อนที่แขนหุ่นยนต์ รับข้อมูลจาก 3D scanner และประเมินความสมบูรณ์ของโมเดลสามมิติที่ได้จากการสแกนได้ โดยระบบฯ จะต้องสามารถปรับใช้กับแขนหุ่นยนต์รุ่นอื่น ๆ ที่รองรับระบบปฏิบัติการหุ่นยนต์ (Robot Operating System: ROS) และกล้องสแกนเนอร์สามมิติที่สามารถเข้าถึง API เพื่อดึงข้อมูลการสแกนได้
{kind=link}
{kind=link}
{kind=link}
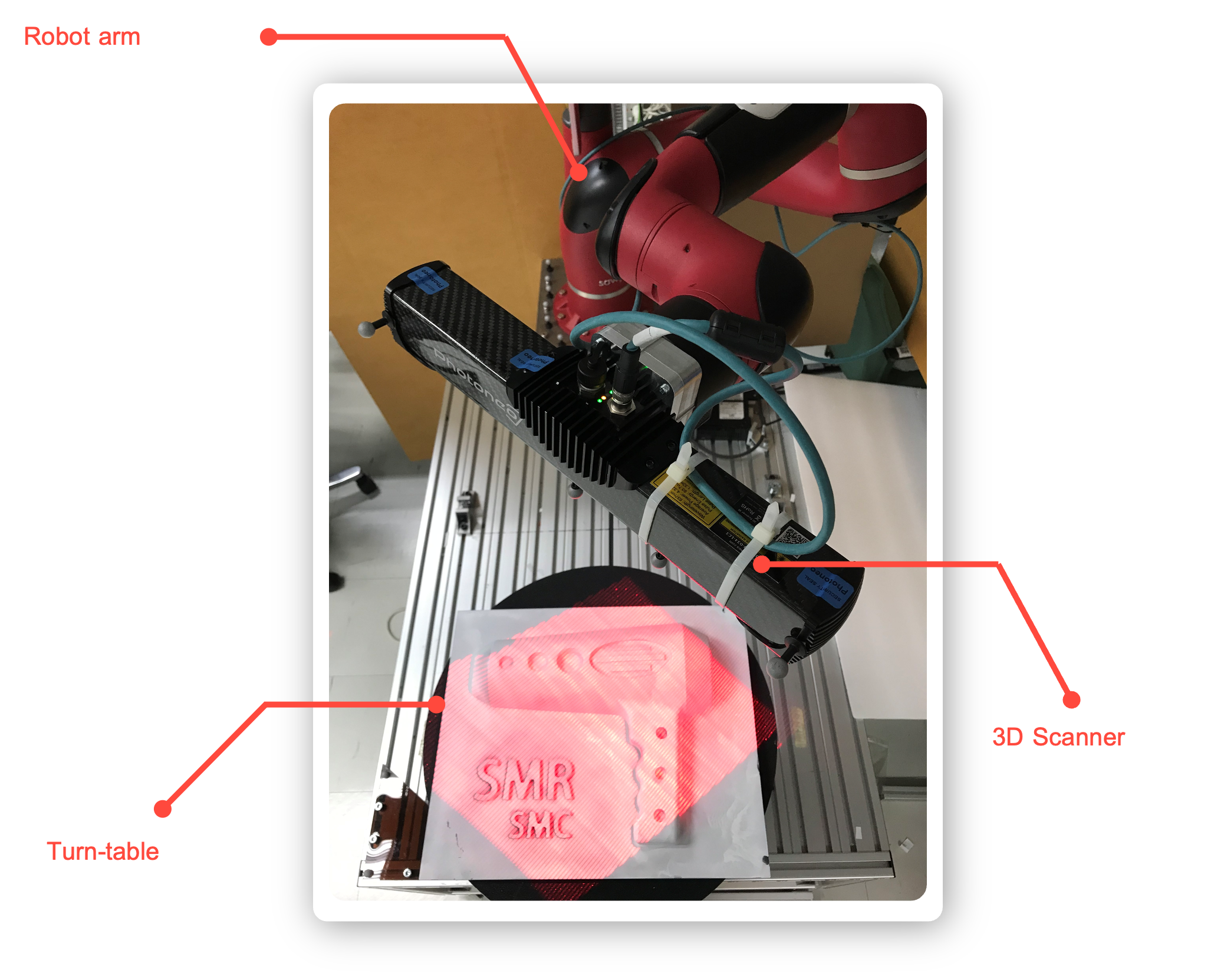
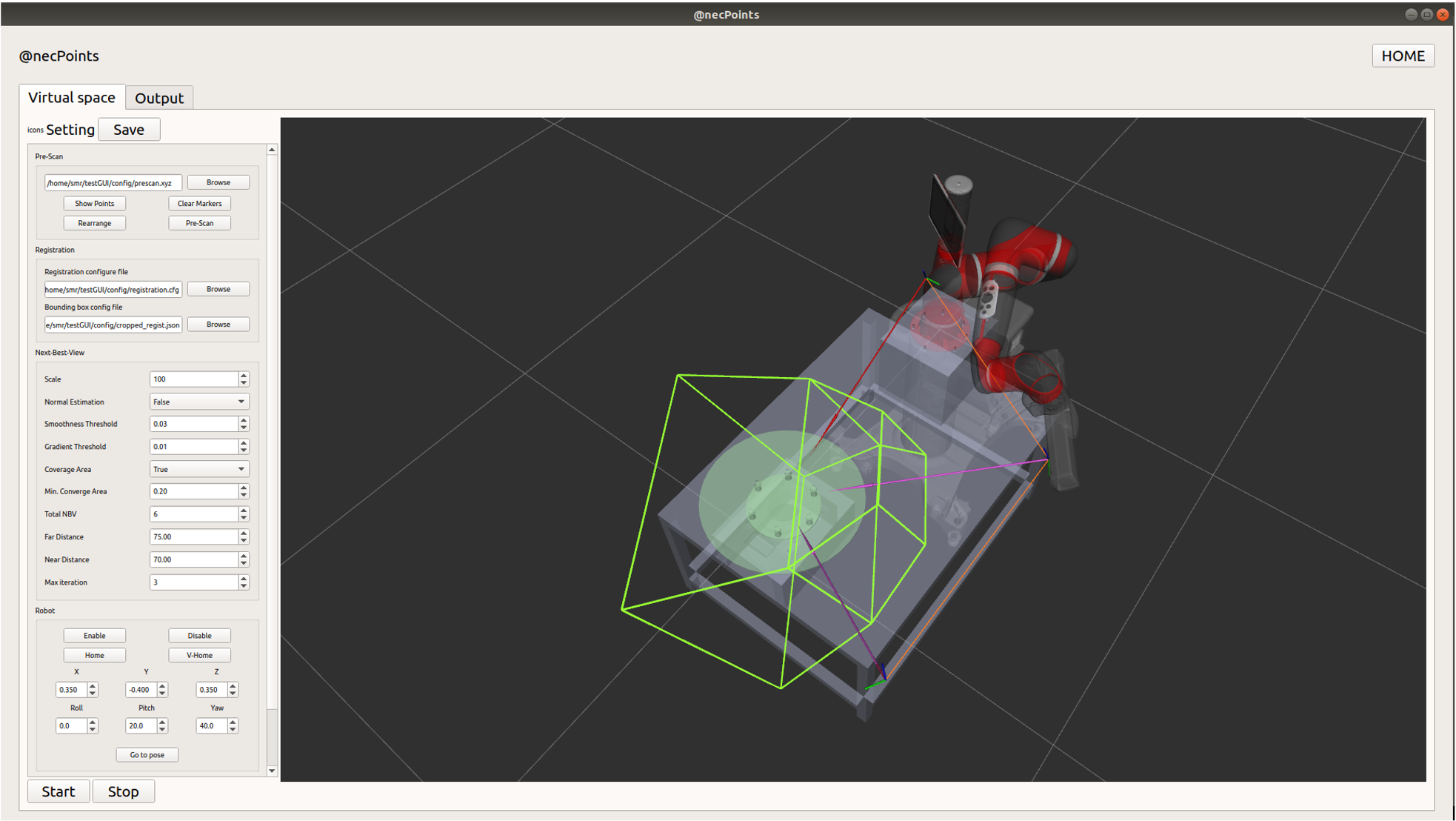
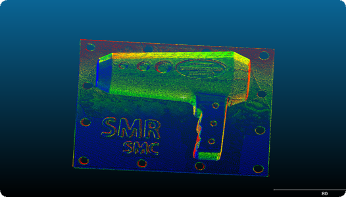
3D Scanner Robot คือ แพลตฟอร์มหุ่นยนต์สแกนและตรวจสอบชิ้นงานสามมิติโดยอัตโนมัติ มีส่วนประกอบสำคัญของระบบอยู่ 4 ส่วน ได้แก่ (1) สแกนเนอร์สามมิติ (2) แขนกล (3) โต๊ะหมุน (Turn table) และ (4) ซอฟต์แวร์ที่พัฒนาขึ้นโดยทีมวิจัย การทำงานเริ่มจากนำชิ้นงานที่ต้องการสแกนมาวางบนโต๊ะหมุน โดยชิ้นงานนั้นจะมีหรือไม่มีต้นแบบ CAD ก็ได้ จากนั้นระบบจะสแกนเบื้องต้นเพื่อให้ได้ข้อมูลพอยท์คลาวด์โดยคร่าวของชิ้นงาน จากนั้นซอฟต์แวร์จะคำนวณหามุมมองที่ดีที่สุด (Next-Best-View) สำหรับสแกนโดยอัตโนมัติเพื่อให้ได้ข้อมูลพอยท์คลาวด์ของชิ้นงานโดยครบถ้วน โดยมีการพิจารณาพื้นที่ซ้อนทับ (Coverage area) เพื่อช่วยลดจำนวนมุมมองที่จะต้องทำการสแกน ซึ่งจะทำให้การสแกนเป็นไปอย่างอัตโนมัติและผู้ใช้งานไม่จำเป็นที่จะต้องวางแผนหรือควบคุมตำแหน่งการสแกนของแขนกลด้วยตนเอง
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
จุดเด่นของแพลตฟอร์มนี้ คือซอฟต์แวร์สามารถปรับเปลี่ยนให้เข้ากับความต้องการของอุตสาหกรรมแต่ละประเภท ระบบมีความยืดหยุ่นที่สามารถปรับเปลี่ยนองค์ประกอบหลักทั้ง 3 ตัว คือ สแกนเนอร์สามมิติ แขนกล และโต๊ะหมุน ให้เป็นรุ่นหรือยี่ห้อต่าง ๆ ที่เหมาะสมกับประเภทของงานที่ต้องการและตามงบประมาณที่มีได้ โดยสแกนเนอร์สามมิติที่นำมาใช้งานในระบบต้องมี API หรือ SDK ที่สามารถใช้ในการควบคุมการทำงานได้ และแขนกลต้องรองรับ ROS
รูปแบบการให้บริการ: เช่าใช้อุปกรณ์ และ Software ที่เกี่ยวข้อง
{kind=link}
{kind=link}
{kind=link}
{kind=link}