
บทความ : ชำนาญ ปัญญาใส และ รพีพงศ์ โชครุ่งอิสรานุกูล
ทีมระบบไซเบอร์-กายภาพ (CPS)
กลุ่มวิจัยไอโอทีและระบบอัตโนมัติสำหรับงานอุตสาหกรรม (IIARG) เนคเทค สวทช.
ในช่วงอุตสาหกรรมยุคที่ 3 หุ่นยนต์อุตสาหกรรมถูกนำมาใช้ในโรงงานอย่างแพร่หลาย เช่น ในอุตสาหกรรม ผลิตรถยนต์ และอุตสาหกรรมผลิตเครื่องดื่ม ปัจจุบันหุ่นยนต์เข้ามามีบทบาทอย่างสูงในโรงงาน สมัยใหม่ที่ต้องการการผลิตอย่างต่อเนื่อง การควบคุมคุณภาพที่เข้มงวด และความประณีตสูง ในช่วงวิกฤติโรคระบาด ความต้องการใช้หุ่นยนต์ยิ่งสูงขึ้นอย่างมาก จากปัจจัยความเสี่ยงของ การหยุดสายการผลิตเนื่องจากคนงานเจ็บป่วย หุ่นยนต์และระบบออโตเมชั่นจึงเป็นสิ่งสำคัญอย่างยิ่ง ในการลดความเสี่ยงของการหยุดงานสายการผลิต รวมถึงลดผลกระทบกับห่วงโซ่อุปทาน เมื่อความต้องการใช้หุ่นยนต์ในแต่ละสาขาอุตสาหกรรมมีมากขึ้น ความต้องการวิศวกรทางด้านหุ่นยนต์ ย่อมมีความต้องการเป็นเท่าตัว การพัฒนาองค์ความรู้และทักษะในการเขียนโปรแกรมควบคุม จึงมีความสำคัญ สำหรับวิศวกรหรือช่างเทคนิคควบคุมการผลิตด้วยหุ่นยนต์
ในบทความนี้จะได้อธิบายถึงหุ่นยนต์ และวิธีการเขียนโปรแกรมควบคุมในเบื้องต้น เพื่อเป็นแนวทางให้ผู้สนใจได้ศึกษาค้นคว้าต่อในเชิงลึกสำหรับการพัฒนาทักษะและสมรรถนะทางด้านหุ่นยนต์ต่อไป
ประเภทหุ่นยนต์อุตสาหกรรม (Industrial Robot)
เราสามารถแบ่งประเภทของหุ่นยนต์ตามการใช้งานได้ 6 ประเภท ดังนี้
1. หุ่นยนต์แบบ Cartesian เป็นหุ่นยนต์ที่แกนทั้ง 3 ของหุ่นยนต์จะเคลื่อนที่เป็นแนวเส้นตรง หุ่นยนต์มีความแข็งแรง และมีประสิทธิภาพ ในการรับน้ำหนักได้มาก หุ่นยนต์ชนิดนี้นิยมใช้ในการหยิบจับ เพื่อทำการประกอบ เช่น การประกอบชิ้นส่วนอิเล็กทรอนิกส์ หรือติดชิ้นส่วนยานยนต์ เนื่องจาก โครงสร้างมีความแข็งแรงตลอดแนวการเคลื่อนที่ ดังนั้น จึงเหมาะกับงานเคลื่อนย้ายชิ้นงานหนัก ๆ หรือ เรียกว่า Pick-and-Place เช่น ใช้โหลดชิ้นงานเข้าเครื่องจักร (Machine loading) ใช้จัดเก็บชิ้นงาน (Stacking) นอกจากนี้ ยังสามารถใช้ในงานประกอบ (Assembly)

ที่มา: Yamaha-Motor
2. หุ่นยนต์ทรงกระบอก (Cylindrical Robot) เป็นหุ่นยนต์ที่มีลักษณะ การเคลื่อนที่คล้าย Cartesian แต่มีความแตกต่างกันอยู่ที่ตัวฐานของหุ่นจะเป็นการหมุนรอบแกน แทนการเคลื่อนที่แบบเคลื่อนเข้าเลื่อนออก โดยทั่วไปใช้ในงานการหยิบ-วางชิ้นงาน (Pick-and-Place) ขนย้ายสิ่งของ งานเชื่อม รวมถึงงานประกอบต่างๆ เน้นการทำงานที่รวดเร็ว เพราะสามารถเคลื่อนที่เข้าออกบริเวณที่เป็นช่องโพรงเล็กๆ ได้สะดวก หุ่นยนต์ประเภทนี้จึงนิยมใช้ในห้องปฏิบัติการ

ที่มา: Thermo Scientific
3. SCARA หรือ Selective Compliance Assembly Robot Arm เป็นหุ่นยนต์ที่มีการเคลื่อนที่แบบหมุน 2 จุด โดยจะสามารถเคลื่อนที่ได้รวดเร็วในแนวระนาบ และมีความแม่นยำสูงจึงเหมาะกับงานประกอบชิ้นส่วนทาง อิเล็กทรอนิกส์ที่ไม่ต้องการ ความรวดเร็วในการหมุนมากนัก แต่จะไม่เหมาะกับงานประกอบชิ้นส่วนทางกล (Mechanical Part) งานตรวจสอบ (Inspection) และงานบรรจุภัณฑ์ (Packaging)

ที่มา: Delta Electronics
4. Polar หรือที่เรียกว่า Spherical Robot คือหุ่นยนต์ที่มีแนวการเคลื่อนที่เป็นการหมุนสองแกน คือที่ฐานและที่ไหล่ของหุ่นยนต์ และส่วนมือจับสามารถยืดหดในแนวเส้นตรงได้ หุ่นยนต์ประเภทนี้ สามารถทำงานในการหยิบจับชิ้นงาน รวมถึงงานเชื่อมรูปแบบต่าง ๆ ได้ดี เหมาะกับการใช้ในงานที่มี การเคลื่อนที่ในแนวตั้ง (Vertical) เพียงเล็กน้อย เช่น การโหลดชิ้นงานเข้าออกจากเครื่องปั้ม (Press) หรืออาจจะใช้งานเชื่อมจุด (Spot Welding)
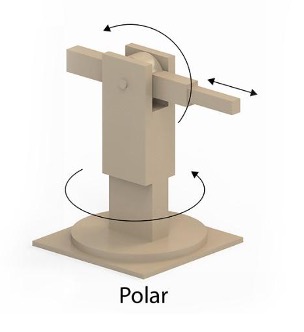
ที่มา: howtorobot.com

ที่มา: ieee.org
5. หุ่นยนต์ Delta หรือ หุ่นยนต์ Parallel มีรูปทรงคล้ายแมงมุม มีจุดเด่น ในเรื่อง ความเร็ว ความแม่นยำ และ ความแข็งแรงทนทาน มีส่วนประกอบระบบเซนเซอร์ และระบบการมองเห็นที่ติดไว้บนแขนหุ่นยนต์ ทำให้การจับและการวางสิ่งของที่กำลังเคลื่อนที่มีความแม่นยำสูง ดังนั้นหุ่นยนต์ประเภทนี้จึงเหมาะกับ การหยิบจับวางชิ้นงาน ขนาดเล็กที่เคลื่อนด้วยความเร็วสูง การหยิบจับวางบนสายพานการผลิต การบรรจุภัณฑ์ชิ้นงาน เช่น ชิ้นส่วนอิเล็กทรอนิกส์ ขนม หรือ อาหาร
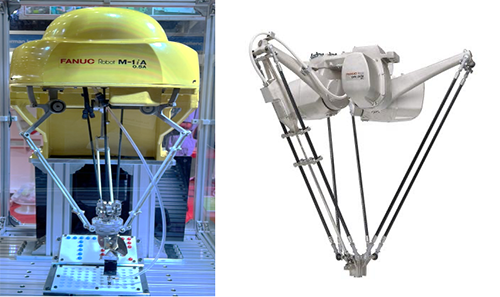
ที่มา: Fanuc
6. Articulated (Jointed Arm) ทุกแกนการเคลื่อนที่จะเป็นแบบหมุน (Revolute) รูปแบบการเคลื่อนที่จะคล้ายกับแขนคน ซึ่งจะประกอบด้วยช่วงเอว ท่อนแขนบน ท่อนแขนล่าง ข้อมือ การเคลื่อนที่ทำให้ได้พื้นที่ การทำงาน หุ่นยนต์ชนิดนี้สามารถใช้งานได้กว้างขวาง เพราะสามารถเข้าถึง ตำแหน่งต่างๆ ได้ดี เช่น งานเชื่อม Spot Welding, Path Welding, งานยกของ, งานตัด, งานทากาว, งานที่มีการเคลื่อนที่ยากๆ เช่น งานพ่นสี งาน Sealing เป็นต้น

ที่มา: OMRON
หุ่นยนต์อุตสาหกรรมโดยทั่วไปจะมีพื้นที่ในการทำงานจำเพาะ มีการกำหนดพื้นที่ความปลอดภัย มนุษย์ไม่อาจเข้าทำงานใกล้ได้ ในปัจจุบันได้มีการพัฒนาหุ่นยนต์ที่ทำงานร่วมกับมนุษย์เรียกว่า Collaborative Robot หรือ Cobot หรือ โคบอทเป็นหุ่นยนต์ที่สามารถทำงานร่วมกับมนุษย์ได้โดยตรง และปลอดภัยในพื้นที่ที่ทำงานร่วมกัน ได้ถูกนำมาใช้งานในอุตสาหกรรมอย่างแพร่หลายมากยิ่งขึ้น หุ่นยนต์โคบอทมีหลายประเภท และหลายยี่ห้อในท้องตลาด โดยทั่วไปโคบอทจะถูกใช้สำหรับ งานการหยิบและวาง การจัดเรียงพาเลท การตรวจสอบคุณภาพ และการจัดเรียงเครื่องมือ

ที่มา: ieee.org
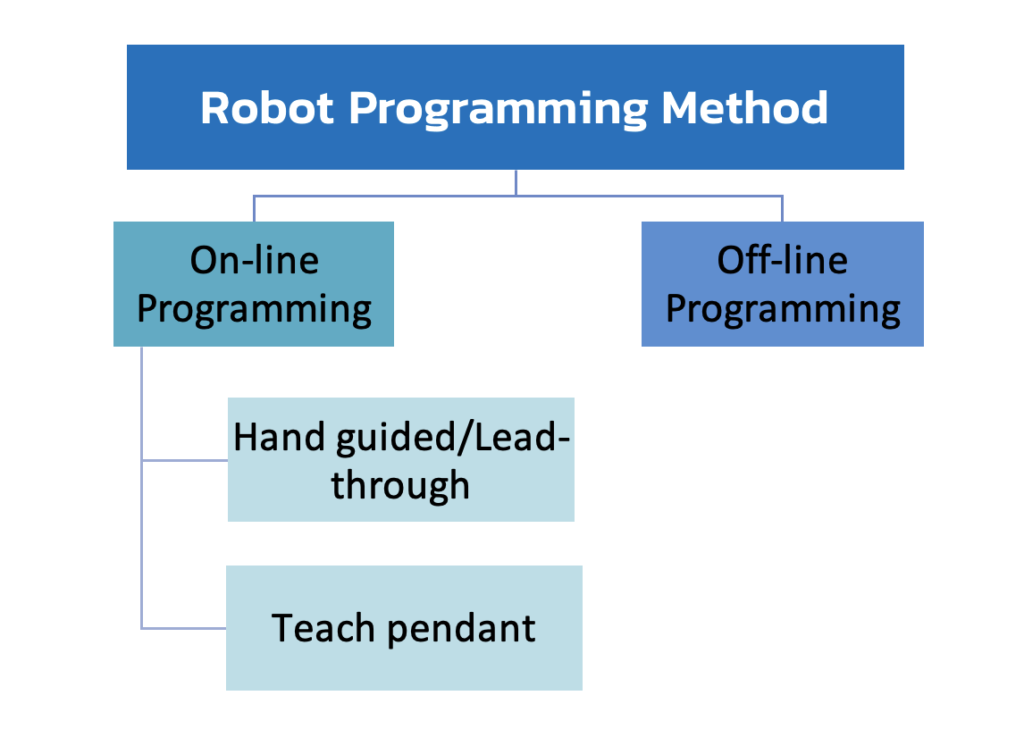
วิธีการโปรแกรมหุ่นยนต์ (Robot Programming Methods)
การเขียนโปรแกรมมีความสำคัญต่อความสำเร็จในการทำงานของระบบหุ่นยนต์ เนื่องจากมีชุดคำสั่งที่จำเป็น สำหรับการประมวลผลหุ่นยนต์ ในการโต้ตอบกับสภาพแวดล้อมเพื่อทำงานเฉพาะ ยกตัวอย่างก่อนที่หุ่นยนต์ จะเชื่อมชิ้นงานเข้าด้วยกัน ต้องตั้งโปรแกรมด้วยคำสั่งเฉพาะเพื่อให้สามารถใช้งานได้อย่างถูกต้องแม่นยำ วิธีการเขียนโปรแกรมมีหลายวิธีสำหรับการเขียนโปรแกรมหุ่นยนต์อุตสาหกรรม แต่สามารถแบ่งได้ 2 วิธีหลัก คือ วิธีการเขียนโปรแกรมแบบออนไลน์ และการเขียนโปรแกรมแบบออฟไลน์ สำหรับการเขียนโปรแกรมออนไลน์ จะแบ่งย่อยเป็นการเขียนโปรแกรมด้วยวิธี การสอนผ่านหน้าจอ และ การสอนนำด้วยมือ
การเขียนโปรแกรมแบบออนไลน์ (On-line Programming)
การโปรแกรมแบบออนไลน์ เป็นวิธีการที่วิศวกรหรือโปรแกรมเมอร์ ทำการโปรแกรมควบคุมการทำงาน ของหุ่นยนต์ ในขณะที่หุ่นยนต์มีการเปิดระบบใช้งานตลอดเวลา โดยอาจเชื่อมต่อสื่อสารผ่านอุปกรณ์ หรือแผงควบคุมแบบมือถือ หรือที่เรียกว่าแผงการสอน (Teach pendant) หรือ ผ่านเครื่องคอมพิวเตอร์ ดังนั้น ถ้าหุ่นยนต์อยู่ในสายการผลิต จำเป็นต้องหยุดสายการผลิตก่อน
1. วิธีสอนนำด้วยมือ (Hand guided/Lead-through Method)
การโปรแกรมโดยวิธีการสอนด้วยมือ (Hand guided) หรือ การสอนนำ (Lead through) ซึ่งโดยทั่วไปแล้ว จะเกี่ยวข้องกับการควบคุมเส้นทางการเคลื่อนที่อย่างต่อเนื่อง ผู้ปฏิบัติงานจะเคลื่อนที่แขนของหุ่นยนต์ด้วยมือ ในเส้นทางที่ต้องการ ขณะที่แขนหุ่นยนต์มีการเคลื่อนที่ ส่วนควบคุมจะจัดเก็บตำแหน่งปัจจุบัน และทิศทางของจุดศูนย์กลางเครื่องมือเป็นระยะๆ หลังจากที่มีการบันทึกตำแหน่ง การเคลื่อนที่เรียบร้อยแล้ว สามารถสั่งให้หุ่นยนต์เล่นย้อนกลับ (Play-back) ตามที่ได้สอนนำไว้แล้ว ตัวอย่าง เช่น งานเชื่อมแบบต่อเนื่อง งานพ่นสี การขัดพื้นผิว เป็นต้น
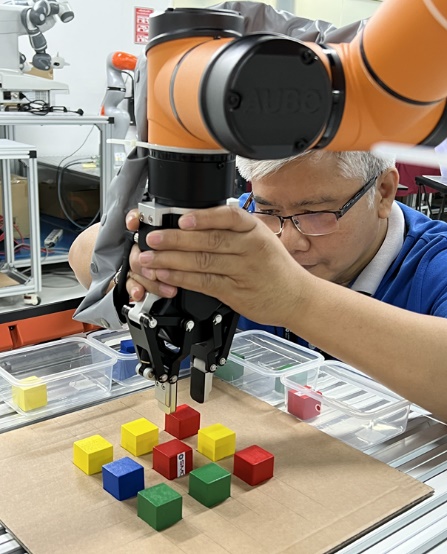
วิธีการโปรแกรมหุ่นยนต์ลักษณะนี้ สามารถทำได้รวดเร็วและสะดวก กว่าการสอนหุ่นยนต์ โดยวิธีการจิ้มหรือพิมพ์คำสั่งงานที่หน้าจอควบคุมแบบมือถือ ไม่จำเป็นต้องมีทักษะ การเขียนโปรแกรมคอมพิวเตอร์ ก็สามารถทำการโปรแกรมหุ่นยนต์ได้ แต่ข้อเสียของ วิธีการโปรแกรมด้วยวิธีการสอนด้วยมือ คือ ไม่เหมาะกับหุ่นยนต์ที่มีขนาดใหญ่ มีน้ำหนักมาก และงานที่ต้องการความแม่นยำเที่ยงตรงสูง การสอนนำด้วยการแนะแนวหุ่นยนต์ด้วยมือไม่อาจกำหนด จุดอย่างแม่นยำได้ จำเป็นต้องใช้การสอนผ่านแผงควบคุมแบบมือถือ มาช่วยกำหนดค่าตำแหน่งที่แม่นยำ
2. Teach Pendant Programming การโปรแกรมแบบการสอนหน้าจอ
การเขียนโปรแกรมผ่านหน้าจออุปกรณ์ควบคุมแบบมือถือ (Teach pendant) โปรแกรมเมอร์จะเพิ่มคำสั่งทีละบรรทัดและกำหนดเงื่อนไขแต่ละคำสั่งเป็นลำดับ ชุดคำสั่งโดยทั่วไปแบ่งเป็น 3 กลุ่ม ได้แก่ กลุ่มคำสั่งพื้นฐาน (Basic) เช่น คำสั่ง Move, Waypoint, Set, Wait กลุ่มคำสั่งขั้นสูง (Advanced) เช่น คำสั่ง Thread, Procedure, Script และ กลุ่มคำสั่งอุปกรณ์ต่อพ่วง (Peripheral) เช่น Gripper, Smart3D
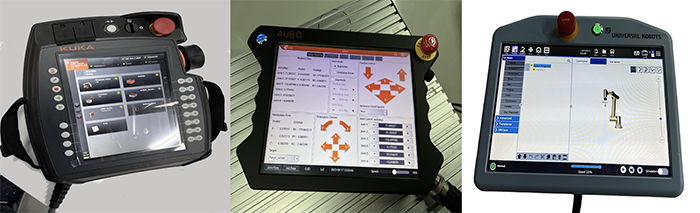
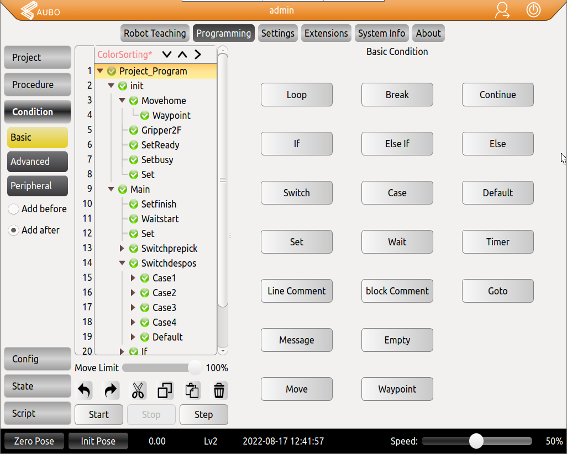
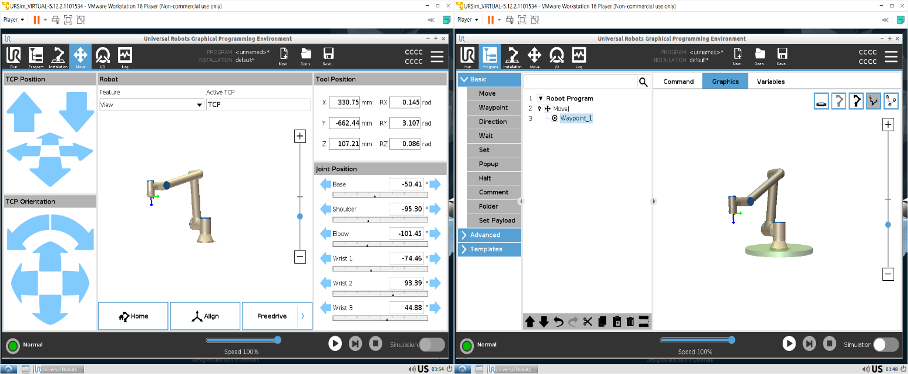
การเขียนโปรแกรมแบบออนไลน์ผ่านหน้าจอแผงควบคุมแบบมือถือ
ตัวอย่าง หากต้องการให้ตำแหน่งหุ่นยนต์เคลื่อนที่ Move ไปยังตำแหน่งพิกัดตาม Waypoint โดยการจี้
ที่ลูกศรที่ช่อง Position Control เพื่อเลื่อนแขนหุ่นยนต์ไปตามแนวแกน XYZ และปรับมุมทิศทางของ หน้าแปลนจุดศูนย์กลางเครื่องมือ (Tool Center Point:TCP) โดยการจี้ที่ ลูกศรที่ช่อง Orientation Control ให้หมุนไปตามทิศทางที่ต้องการ หุ่นยนต์บางตัวที่แผงควบคุม แบบมือถืออาจจะขยับ หรือเลื่อนตำแหน่งของแขนหุ่นยนต์โดยใช้ Joystick
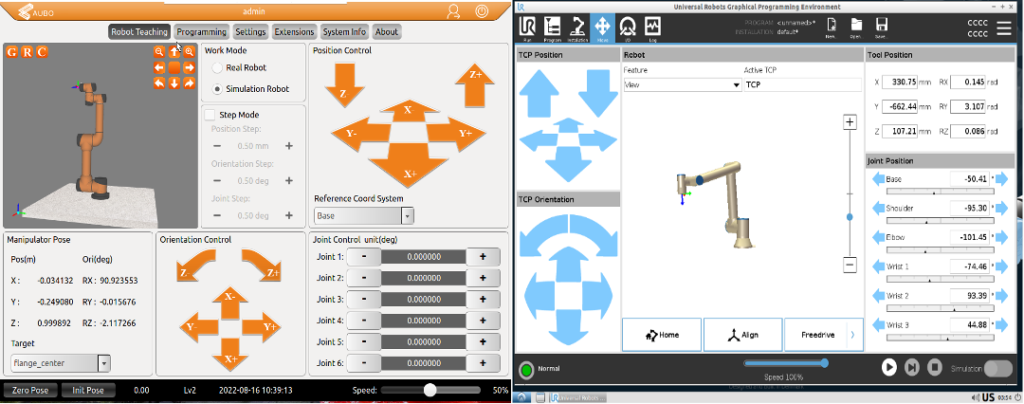
การควบคุมการเคลื่อนที่ของแขนหุ่นยนต์โดยการจิ้มลูกศร
ปรับตำแหน่งและมุมของจุดศูนย์กลางเครื่องมือ (TCP)
เมื่อผู้ปฏิบัติงานทำการเคลื่อนแขนหุ่นยนต์ให้อยู่ในตำแหน่งพิกัดที่ต้องการ โดยใช้แผงควบคุมแบบมือถือแล้ว ผู้ปฏิบัติงานสามารถบันทึกพิกัดภายในรายการตำแหน่งได้ โดยการกดปุ่มบันทึก หรือยืนยัน เนื่องจากเหตุผล ด้านความปลอดภัย หุ่นยนต์สามารถขับเคลื่อนในโหมดการทำงานนี้ได้เฉพาะในแบบช้าๆ เท่านั้น เนื่องจาก ผู้ปฏิบัติงานทำงานภายในพื้นที่ทำงานของหุ่นยนต์ แผงควบคุมจึงจะต้องมีการติดตั้งสวิตช์ฉุกเฉิน ตัวอย่างลักษณะของงาน สำหรับวิธีการโปรแกรมลักษณะนี้ จะเป็นการทำงานแบบทั่วไปที่ไม่ซับซ้อน เช่น งานการเชื่อมแบบจุด งานหยิบและวาง
การเขียนโปรแกรมแบบออฟไลน์ (Off-line Programming : OLP)
การโปรแกรมแบบออฟไลน์นั้นผู้เขียนโปรแกรมไม่จำเป็นต้องปฏิบัติงานร่วมกับหุ่นยนต์ทำงานจึงไม่จำเป็นต้อง หยุดสายการผลิต กรณีหยุดการผลิตจะเกิดขึ้นเมื่อมีการโปรแกรมงานลงเครื่องควบคุมหุ่นยนต์เท่านั้น ทั้งนี้ ผู้เขียนโปรแกรมจะใช้ซอฟต์แวร์สำหรับการเขียนโปรแกรม และจำลองการทำงานของหุ่นยนต์ (Robot simulator) ที่ติดตั้งบนเครื่องคอมพิวเตอร์แทน โดยการเขียนโปรแกรมทดสอบการทำงานของหุ่นยนต์ เสมือนว่ากำลังทำงานกับหุ่นยนต์จริง ซึ่งทำให้ผู้เขียนสามารถทดสอบ หรือทดลองเงื่อนไขต่างๆ ได้หลายรูปแบบ และเลือกเงื่อนไขที่เหมาะสมสำหรับการโปรแกรม หุ่นยนต์ เป็นการลดความเสี่ยง และความผิดพลาดที่จะเกิดกับหุ่นยนต์ก่อนไปทดสอบใช้งานจริง
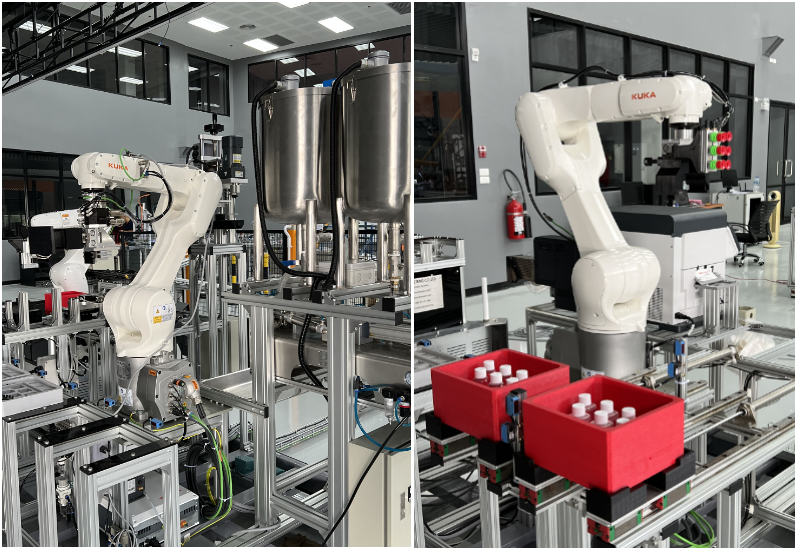
รูปแบบการเขียนโปรแกรมแบบออฟไลน์ สามารถเขียนโค้ดคำสั่งเป็นตัวหนังสือ (Text based) หรือแบบกราฟิก (Graphical programming) ขึ้นอยู่กับความสามารถของซอฟต์แวร์โปรแกรมที่ผู้ผลิตโปรแกรมได้สร้างขึ้นมา ซอฟต์แวร์สำหรับการโปรแกรม และจำลองการทำงานของหุ่นยนต์ โดยทั่วไปมักจะผลิตโดยผู้ผลิตหุ่นยนต์เอง เช่น ROBOGUIDE ของบริษัท Fanuc, KUKA.Sim/KUKA.Apptech ของบริษัท KUKA, URSim5 ของบริษัท Universal Robots, RobotStudio ของบริษัท ABB หรือใช้โปรแกรมออฟไลน์ที่ผลิตโดยผู้ผลิตเจ้าอื่น (third-party vendor) เช่น RoboDK, RobotMaster, OCTOPUZ, Delfoi เป็นต้น
รูปแบบการเขียนโปรแกรมแบบออฟไลน์เหมาะสมที่สุดสำหรับกระบวนการผลิตที่มีแอปพลิเคชั่นการวางแผนเส้นทางเคลื่อนที่ที่ซับซ้อน โดยส่วนมากจะมีการทำงานของหุ่นยนต์หลายอย่าง เช่น การตัดด้วยเลเซอร์ การเชื่อม การพ่นสี การขัดผิว ทั้งนีการหยิบและวางแบบง่าย เช่น การบรรจุหีบห่อ การจัดเรียงพาเลท และการประกอบอาจไม่เหมาะสำหรับรูปแบบวิธีการโปรแกรมแบบออฟไลน์
โปรแกรม URSim ของ Universal Robots จำลองหน้าตาเหมือนกับใช้งานบนอุปกรณ์ควบคุมแบบมือถือ
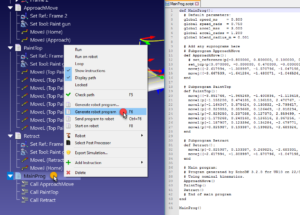
ตัวอย่างโปรแกรมสำหรับการจำลองการทำงานหุ่นยนต์
RoboDK เป็นซอฟต์แวร์การเขียนโปรแกรมและการจำลองแบบออฟไลน์ สำหรับหุ่นยนต์อุตสาหกรรมซอฟต์แวร์จำลอง สามารถใช้ได้กับงานการผลิตที่หลากหลาย เช่น การกัด การเชื่อม การหยิบและวาง การบรรจุ และการติดฉลาก การจัดวางบนแท่นวางสินค้า การพ่นสี การสอบเทียบหุ่นยนต์ และอื่นๆ (https://robodk.com)
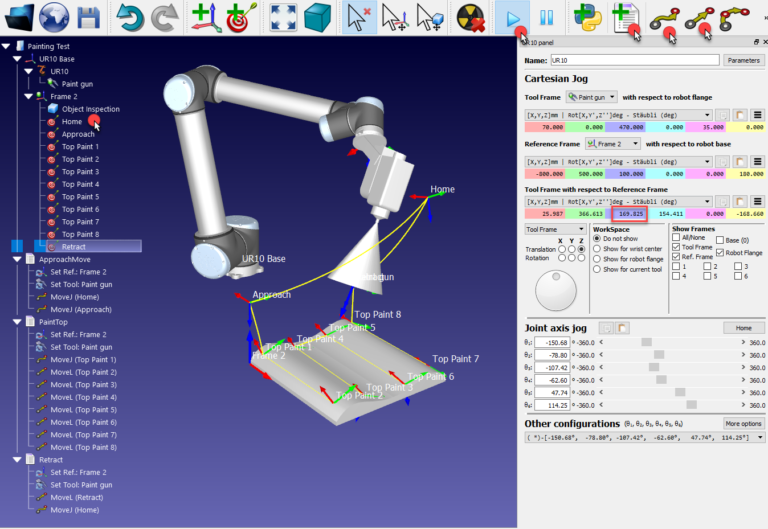
ที่มา: RoboDK
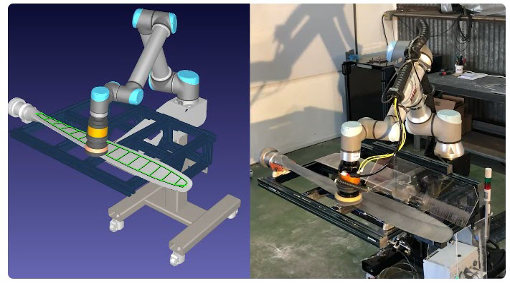
ที่มา: RoboDK
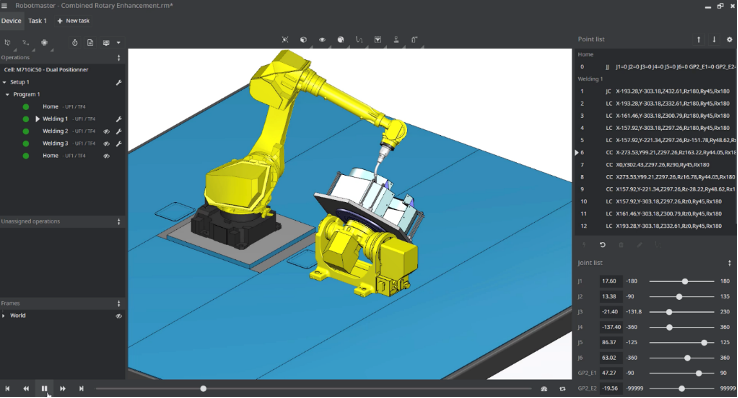
RobotMaster เป็นซอฟต์แวร์ CAD/CAM สำหรับหุ่นยนต์อุตสาหกรรมแบบ off-line โดยโปรแกรม สามารถสร้างโปรแกรมเส้นทางการเคลื่อนที่ของหุ่นยนต์โดยไม่ต้องใช้วิธีสอน ( teaching ) ลดเวลาในการสร้างโปรแกรม สามารถจำลองการทำงานแบบ 3 มิติได้ และลดข้อผิดพลาดที่เกิดจากการใช้วิธีสอน (teaching) (www.robotmaster.com)
Gazebo เป็นโปรแกรมจำลองหุ่นยนต์โอเพนซอร์ส 3 มิติ โดยรวมเอ็นจิ้น ทางฟิสิกส์ ODE, การเรนเดอร์ OpenGL และโค้ดโปรแกรมสนับสนุนสำหรับการจำลอง เซ็นเซอร์และการควบคุมแอคทูเอเตอร์ (https://gazebosim.org)
Webots เป็นโปรแกรมจำลองหุ่นยนต์ 3 มิติ แบบโอเพนซอร์ส ที่ใช้ในอุตสาหกรรม การศึกษา และการวิจัย (www.cyberbotics.com)
CoppeliaSim หรือที่รู้จักกันในชื่อ V-REP เป็นหุ่นยนต์จำลอง ที่ใช้ในอุตสาหกรรม การศึกษา และการวิจัย เดิมได้รับการพัฒนาภายใน R&D ของบริษัทโตชิบา และขณะนี้ กำลังได้รับการพัฒนาและบริการโดย Coppelia Robotics AG ประเทศสวิตเซอร์แลนด์ (www.coppeliarobotics.com)
จากข้างต้นที่กล่าวถึงการโปรแกรมหุ่นยนต์อุตสาหกรรมพื้นฐานทั่วไปที่ผลิตและจำหน่ายในท้องตลาด โดยที่ผู้เขียนโปรแกรมมีหน้าที่เพียงเขียนโปรแกรมควบคุมคำสั่งการทำงานของหุ่นยนต์ โดยไม่ได้มีส่วนในการ สร้างฮาร์ดแวร์ ภาษาที่ใช้เขียนโปรแกรมสำหรับควบคุมหุ่นยนต์จะจำเพาะหุ่นยนต์แต่ละยี่ห้อ เช่น ABB เขียนด้วยภาษา RAPID, KUKA เขียนด้วยภาษา KRL, FANUC เขียนด้วยภาษา KAREL, UR เขียนด้วยภาษา URScript เป็นต้น
ในกรณีที่ผู้พัฒนาประสงค์ที่จะสร้างหุ่นยนต์ขึ้นมาเอง เป็นต้องเขียนโปรแกรมควบคุมหุ่นยนต์เฉพาะกิจขึ้นมา อาจจะเขียนโปรแกรมด้วยภาษา C/C++, Python, Java, Lua หรือใช้โปรแกรมเช่น MATLAB ในการพัฒนา ส่วนควบคุมหุ่นยนต์ หรือใช้ระบบปฏิบัติการหุ่นยนต์ในการพัฒนาหุ่นยนต์ เป็นต้น
ระบบปฏิบัติการสำหรับหุ่นยนต์
เมื่อหุ่นยนต์ถูกใช้งานนอกเหนือจากงานในสายการผลิตอุตสาหกรรม สู่สายงานอื่น ทั้งหุ่นยนต์บริการ ในภาคธุรกิจ หุ่นยนต์การศึกษา การแพทย์ หุ่นยนต์สำรวจ หรือหุ่นยนต์ทางทหาร การพัฒนาแอพพลิเคชั่น สำหรับหุ่นยนต์ จึงให้ความสนใจในด้านการพัฒนาด้วยแพลตฟอร์มหรือระบบปฏิบัติการสำหรับหุ่นยนต์ (Robot Operating System for robots) เช่น ROS, URBI, Microsoft Robotics Developer Studio
ROS (Robot Operating System)
ระบบปฏิบัติการหุ่นยนต์ (ROS) (https://www.ros.org) เป็นแพลตฟอร์มแบบเปิด สำหรับการพัฒนาแอพพลิเคชั่น สำหรับหุ่นยนต์ทำงานในหลากหลายด้าน นิยมอย่างมากโดยเฉพาะการประยุกต์ใช้งานในกลุ่มหุ่นยนต์ ด้านบริการ (service robots) ทั้งนี้ เรายังสามารถประยุกต์ใช้งานสำหรับหุ่นยนต์อุตสาหกรรม โดยมีกลุ่มคณะทำงาน ROS ที่เน้นการใช้งานทางด้านอุตสาหกรรม เรียกว่า ROS-Industrial (https://rosindustrial.org/) สำหรับภาพโครงสร้างสถาปัตยกรรม ROS-Industrial แสดงดังรูป
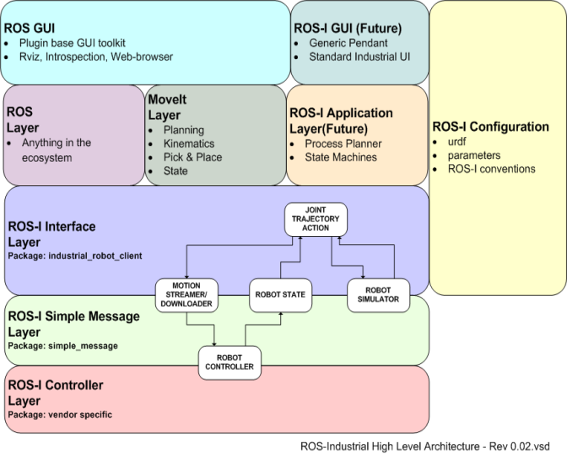
โครงสร้างสถาปัตยกรรม ROS-Industrial (ที่มา: https://wiki.ros.org/Industrial)
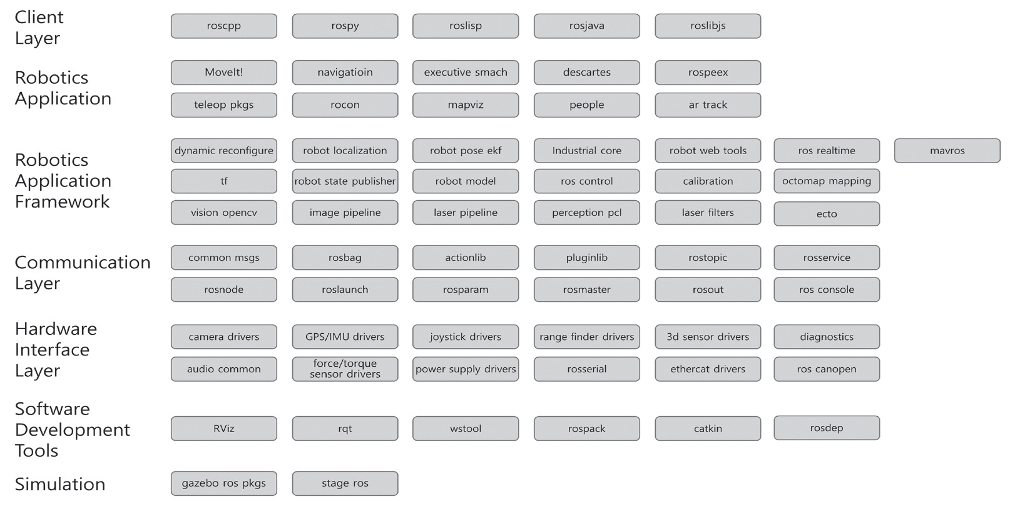
ส่วนประกอบของ ROS (ที่มา: http://wiki.ros.org/APIs )
ตัวอย่าง ผู้ผลิตหุ่นยนต์ที่สนับสนุนการพัฒนาโปรแกรมด้วย ROS ได้แก่ บริษัท Universal Robots, AUBO, Fanuc ตัวอย่างงานวิจัยการใช้งาน ROS ในการพัฒนาแอปพลิเคชันหุ่นยนต์ ชื่อ Manipulator Control in Collaborative Assembly
ปัญญาประดิษฐ์และการเรียนรู้ของเครื่องจักร (Artificial Intelligence/Machine Learning)
ปัญญาประดิษฐ์ หรือ AI และการเรียนรู้ของเครื่องจักร (machine learning) ได้ถูกนำมาใช้งานกับหุ่นยนต์ มายาวนาน ทำให้หุ่นยนต์สามารถประยุกต์ตัวเองและปรับแต่งการทำงาน หรือทำการอัพเดตพารามิเตอร์ ใหม่อีกครั้ง ให้สามารถทำงานได้ถูกต้องแม่นยำตามสภาพแวดล้อม การใช้ AI ในการโปรแกรมหุ่นยนต์ เพื่อให้หุ่นยนต์สามารถปรับเปลี่ยนตัวเองได้ (reconfigurable) ยังคงอยู่ในขั้นของการวิจัยพัฒนา
การโปรแกรมด้วย VR
AR (Augmented Reality) ได้ถูกนำมาใช้งานในการฝึกอบรมพัฒนาทักษะของบุคลากรในการปฏิบัติงาน กับเครื่องจักรเสมือน โดยอยู่ด้านหน้าเครื่องจริง เป็นวิธีการฝึกฝนที่ผู้เรียนสามารถฝึกฝนได้ตลอดเวลา งานด้าน VR (Virtual Reality) และ AR ได้ถูกนำมาประยุกต์ใช้กับการสอนหุ่นยนต์และการโปรแกรมหุ่นยนต์ เสมือนหนึ่งกับการทำงานร่วมกับหุ่นยนต์จริง
บทสรุป
บทความนี้ได้กล่าวถึงวิธีการโปรแกรมหุ่นยนต์อุตสาหกรรมรูปแบบต่างๆ ทำให้ผู้ที่สนใจเรียนรู้เกี่ยวกับ การโปรแกรมหุ่นยนต์เห็นภาพรวมและเข้าใจกระบวนการโปรแกรมหุ่นยนต์ สามารถต่อยอดองค์ความรู้ และทักษะของตนเองในระดับสูงที่ขึ้น อย่างไรก็ตาม การใช้งานหุ่นยนต์ที่มีความซับซ้อนมากขึ้น ขีดความสามารถของหุ่นยนต์ที่สูงขึ้น เทคนิคและวิธีการโปรแกรมหุ่นยนต์ได้มีการพัฒนาเครื่องมือใหม่ๆ เพื่ออำนวยความสะดวกให้การพัฒนาแอปพลิเคชันสำหรับหุ่นยนต์ได้อย่างรวดเร็ว
การเลือกวิธีการโปรแกรมที่ดีที่สุด เป็นสิ่งที่ตอบได้ยาก ขึ้นอยู่กับปัจจัยและสถานการณ์มาประกอบร่วมกัน เช่น ลักษณะและความซับซ้อนของงาน ประสบการณ์ของการเขียนโปรแกรมของผู้ปฏิบัติงาน ระยะเวลา ผลกระทบในการหยุดสายการผลิต ฟังก์ชั่นต่างๆ ที่บริษัทผู้ผลิตหุ่นยนต์ให้มา หรือแม้แต่ความสะดวก ของเครื่องมือ หรือซอฟต์แวร์โปรแกรมที่ผู้ผลิตจัดหาให้ เป็นสิ่งที่ผู้เขียนโปรแกรมต้องเลือกใช้ ตามความสะดวก และเหมาะสมกับสถานการณ์ การติดตามข้อมูลข่าวสารผ่านสื่อต่างๆ ตลอดจน การฝึกทักษะอย่างต่อเนื่อง จึงสำคัญต่อการพัฒนาความรู้ และทักษะของกำลังคนอุตสาหกรรมยุคใหม่
เอกสารอ้างอิง
[1] บุญธรรม ภัทราจารุกุล, หุ่นยนต์อุตสาหกรรม (ปวส.) (รหัสวิชา 30127-2103), ซีเอ็ดยูเคชั่น, 2565
[2] รายงานการศึกษาเรื่อง “อุตสาหกรรมหุ่นยนต์ของประเทศไทย” โดย ฝ่ายวิจัยนโยบาย สวทช. https://waa.inter.nstda.or.th/prs/pub/Robot-Whitepaper-Cover.pdf
[3] อุตสาหกรรมหุ่นยนต์กับการพัฒนาภาคการผลิตของไทย (ตอนที่ 1), https://www.krungsri.com/th/research/research-intelligence/ri-robotic-series1-landscape
[4] Fengxin Zhang, Chow Yin Lai, Milan Simic, Songlin Ding, Augmented reality in robot programming, Procedia Computer Science 176 (2020) 1221–1230.
[5] http://wiki.ros.org/Industrial
[6] Gopika Ajaykumar, Maureen Steele, and Chien-Ming Huang. 2021. A Survey on End-User Robot Programming. ACM Comput. Surv. 54, 8, Article 164 (November 2022), 36 pages. https://doi.org/10.1145/3466819
[7] YoonSeok Pyo, HanCheol Cho, RyuWoon Jung, TaeHoon Lim, ROS Robot Programming, ROBOTIS Co.,Ltd., 2017
[8] รู้จัก 5 ประเภทหุ่นยนต์พื้นฐานในอุตสาหกรรม (Industrial Robot) และการใช้งาน, สถาบันเทคโนโลยีการผลิตสุมิพล, https://simtec.or.th/blog-5-industrial-robot-12112021
ดาวน์โหลดเอกสารเผยแพร่
